Surrogate-based optimisation for fluid dynamic (FSI) systems" in the theme "underpinning methods in fluid dynamics
- Academic lead
- Yongxing Wang, Computing
- Co-supervisor(s)
- Harvey Thompson, Mech Eng
- Project themes
- Biomedical Flows, Underpinning Methods for Fluid Dynamics
This project aims to develop cutting edge numerical methods for optimisation of design and control in fluid-structure interaction systems, with application to understanding of C. elegans locomotion through optimising its biomechanical parameters such as the muscle force distribution.
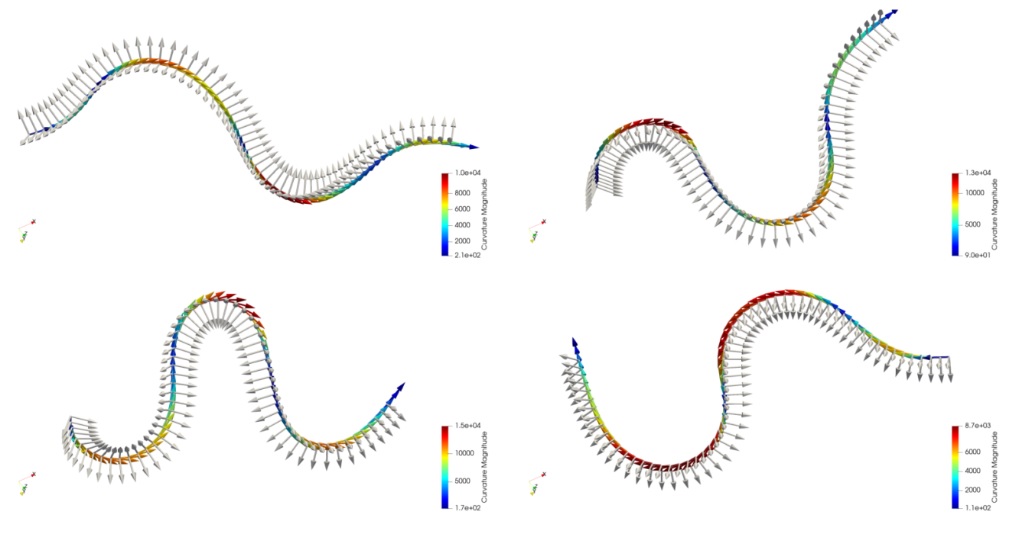
Reconstruction of C. elegans locomotion based upon its centreline data from laboratory